Single-Source Shortest paths18:16
Animation18:16
Dijkstra's algorithm: idea18:16
- Start at
- Keep a heap with a good guess of the distance
- Go to the next vertex in the queue
- Update distances for the neighbours of that vertex
Dijkstra's algorithm18:16

Dijkstra: correctness and complexity18:16
A*18:16
Exercises: A*18:16
Exercises18:16
Dijkstra: recap18:16
Bellman-Ford18:16
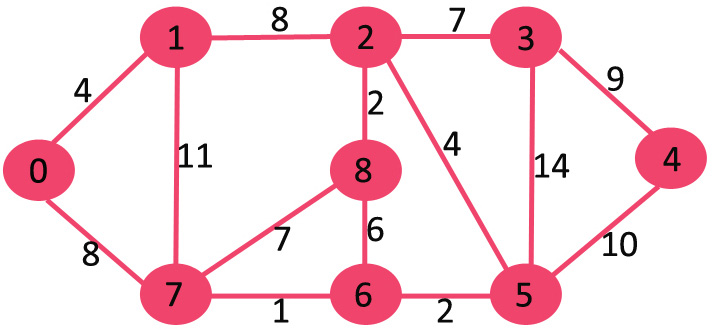
Dijkstra is an efficient algorithm if the weights associated with the edges are nonnegative.

Example
Apply Dijkstra to this graph (we'll apply Bellman-Ford afterwards) with as a starting point
Bellman-Ford: implementation18:16
Exercise
Implement Bellman-Ford to find the length of the shortest path. What's its time complexity?
Exercise
How would you get the actual path as well?
Bellman-Ford: correctness18:16
Detecting negative-weight cycles18:16
Detecting negative-weight cycles: implementation18:16
Exercise
Change your Bellman-Ford code so that it detects negative cycle reachable from the source
Exercises18:16
All Pairs Shortest Paths18:16
1st attempt: guess next-to-last vertex18:16
Python implementation of the first attempt18:16
Exercise
What is the time complexity?
Combining DP and D&C18:16
Floyd-Warshall18:16
Python implementation of Floyd-Warshall18:16